vins-fusion-gpu-tx2-nano
Installation step of vins-fusion gpu version on Nvidia Jetson TX2 and Jetson Nano ( JP 4.2.2)
Prerequisites
Eigen
# Remove pre-built Eigen
sudo apt-get remove libeigen3-dev
cd ~/Downloads/
wget -O eigen.zip https://gitlab.com/libeigen/eigen/-/archive/3.3.7/eigen-3.3.7.zip #check version
unzip eigen.zip
mkdir eigen-build && cd eigen-build
cmake ../eigen-3.3.7/ && sudo make install
pkg-config --modversion eigen3 # Check Eigen Version

Ceres solver
cd ~/Downloads/
sudo apt-get install -y cmake libgoogle-glog-dev libatlas-base-dev libsuitesparse-dev
wget http://ceres-solver.org/ceres-solver-1.14.0.tar.gz
tar zxf ceres-solver-1.14.0.tar.gz
mkdir ceres-bin
mkdir solver && cd ceres-bin
cmake ../ceres-solver-1.14.0 -DEXPORT_BUILD_DIR=ON -DCMAKE_INSTALL_PREFIX="../solver"
#good for build without being root privileged and at wanted directory
make -j3 # 6 : number of cores
make test
make install
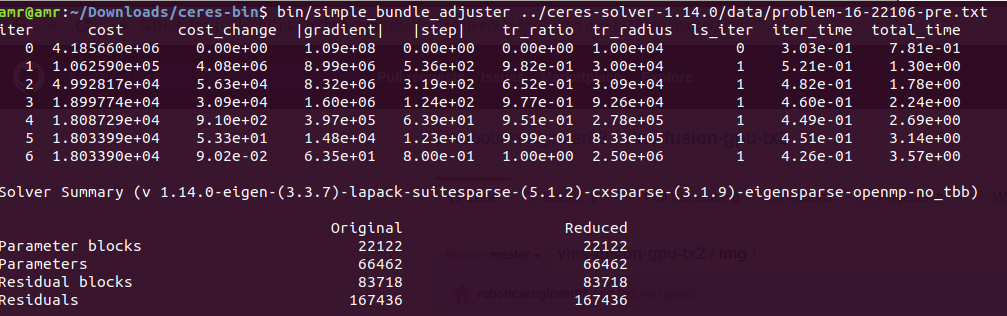
bin/simple_bundle_adjuster ../ceres-solver-1.14.0/data/problem-16-22106-pre.txt # to check version
Opencv
# remove prebuilt opencv
sudo apt-get purge libopencv* python-opencv
sudo apt-get update
sudo apt-get install -y build-essential pkg-config
## libeigen3-dev # recommend to build from source
sudo apt-get install -y cmake libavcodec-dev libavformat-dev libavutil-dev \
libglew-dev libgtk2.0-dev libgtk-3-dev libjpeg-dev libpng-dev libpostproc-dev \
libswscale-dev libtbb-dev libtiff5-dev libv4l-dev libxvidcore-dev \
libx264-dev qt5-default zlib1g-dev libgl1 libglvnd-dev pkg-config \
libgstreamer1.0-dev libgstreamer-plugins-base1.0-dev mesa-utils
sudo apt-get install python2.7-dev python3-dev python-numpy python3-numpy
# To fix OpenGL related compilation problems
cd /usr/lib/aarch64-linux-gnu/
sudo ln -sf libGL.so.1.0.0 libGL.so
sudo vim /usr/local/cuda/include/cuda_gl_interop.h
# Comment (line #62~68) of cuda_gl_interop.h
//#if defined(__arm__) || defined(__aarch64__)
//#ifndef GL_VERSION
//#error Please include the appropriate gl headers before including cuda_gl_interop.h
//#endif
//#else
#include <GL/gl.h>
//#endif
# Then once linking is done, go to Downloads to begin opencv installation
cd ~/Downloads/
wget -O opencv.zip https://github.com/opencv/opencv/archive/3.4.1.zip # check version
unzip opencv.zip
cd opencv-3.4.1/ && mkdir build && cd build
cmake -D CMAKE_BUILD_TYPE=RELEASE \
-D CMAKE_INSTALL_PREFIX=/usr/local \
-D WITH_CUDA=ON \
-D CUDA_ARCH_BIN=6.2 \
-D CUDA_ARCH_PTX="" \
-D ENABLE_FAST_MATH=ON \
-D CUDA_FAST_MATH=ON \
-D WITH_CUBLAS=ON \
-D WITH_LIBV4L=ON \
-D WITH_GSTREAMER=ON \
-D WITH_GSTREAMER_0_10=OFF \
-D WITH_QT=ON \
-D WITH_OPENGL=ON \
-D CUDA_NVCC_FLAGS="--expt-relaxed-constexpr" \
-D WITH_TBB=ON \
../
make # running in single core is good to resolve the compilation issues
sudo make install
cd ../../ && sudo rm -rf opencv-3.4.1 # optional (can save 10GB Disk Space)
pkg-config --modversion opencv # Check opencv Version

ROS-Melodic
cd ~/Downloads/
git clone https://github.com/arjunskumar/vins-fusion-gpu-tx2.git
cd vins-fusion-gpu-tx2/
chmod a+x installROS.sh setupCatkinWorkspace.sh
./installROS.sh
./setupCatkinWorkspace.sh
CV-Bridge
cd ~/catkin_ws/src && git clone https://github.com/ros-perception/vision_opencv
gedit vision_opencv/cv_bridge/CMakeLists.txt
# Edit OpenCV PATHS in CMakeLists and include cmake file
find_package(OpenCV 3 REQUIRED PATHS /usr/local/share/OpenCV NO_DEFAULT_PATH
COMPONENTS
opencv_core
opencv_imgproc
opencv_imgcodecs
CONFIG
)
include(/usr/local/share/OpenCV/OpenCVConfig.cmake) #under catkin_python_setup()
# Save and close CMakeLists
# Build the package
$ cd .. && catkin_make
Vins-Fusion GPU
cd ~/catkin_ws/src && git clone https://github.com/pjrambo/VINS-Fusion-gpu #GPU
sudo apt-get install ros-melodic-tf
sudo apt-get install ros-melodic-image-transport
sudo apt-get install ros-melodic-rviz
# Edit CMakeLists.txt for loop_fusion and vins_estimator
cd ~/catkin_ws/src/VINS-Fusion-gpu/loop_fusion && gedit CMakeLists.txt
##For loop_fusion : line 19
#find_package(OpenCV)
include(/usr/local/share/OpenCV/OpenCVConfig.cmake)
cd ~/catkin_ws/src/VINS-Fusion-gpu/vins_estimator && gedit CMakeLists.txt
##For vins_estimator : line 20
#find_package(OpenCV REQUIRED)
include(/usr/local/share/OpenCV/OpenCVConfig.cmake)
cd ~/catkin_ws/
source devel/setup.bash
catkin_make
Download car.bag to YOUR_DATASET_FOLDER. Open four terminals, run vins odometry, visual loop closure(optional), rviz and play the bag file respectively. Green path is VIO odometry, red path is odometry under visual loop closure.
roslaunch vins vins_rviz.launch
rosrun vins vins_node ~/catkin_ws/src/VINS-Fusion-gpu/config/vi_car/vi_car.yaml
rosrun loop_fusion loop_fusion_node ~/catkin_ws/src/VINS-Fusion-gpu/config/vi_car/vi_car.yaml
rosbag play YOUR_DATASET_FOLDER/car.bag
Jetson Nano
To Add Swap memory of 4GB
sudo fallocate -l 4G /swapfile
sudo chmod 600 /swapfile
sudo mkswap /swapfile
sudo swapon /swapfile
sudo swapon --show
sudo cp /etc/fstab /etc/fstab.bak
echo '/swapfile none swap sw 0 0' | sudo tee -a /etc/fstab
To lock Jetson Nano at its maximum frequency and power mode by running the following commands:
sudo jetson_clocks
sudo nvpmodel -m 0
Setup Realsense-d435i on Jetson Nano
# Clone and install RealSense SDK for Cuda
git clone https://github.com/jetsonhacksnano/installLibrealsense.git
cd installLibrealsense
./installLibrealsense.sh -c
# Build Realsense SDK. Make sure camera is not connected to nano.
./buildLibrealsense.sh [to built from source]
# Connect the Realsense camera to the Nano
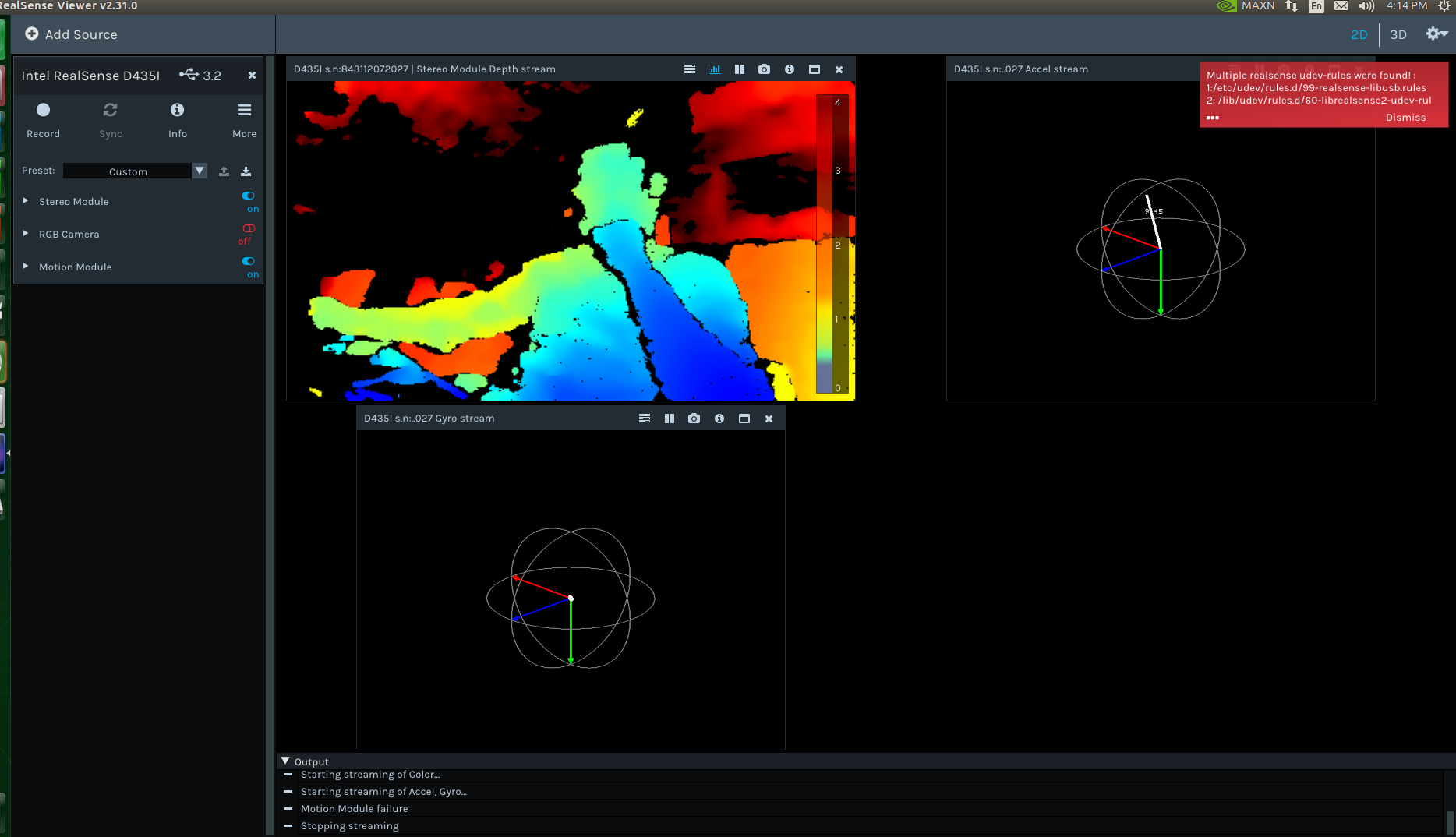
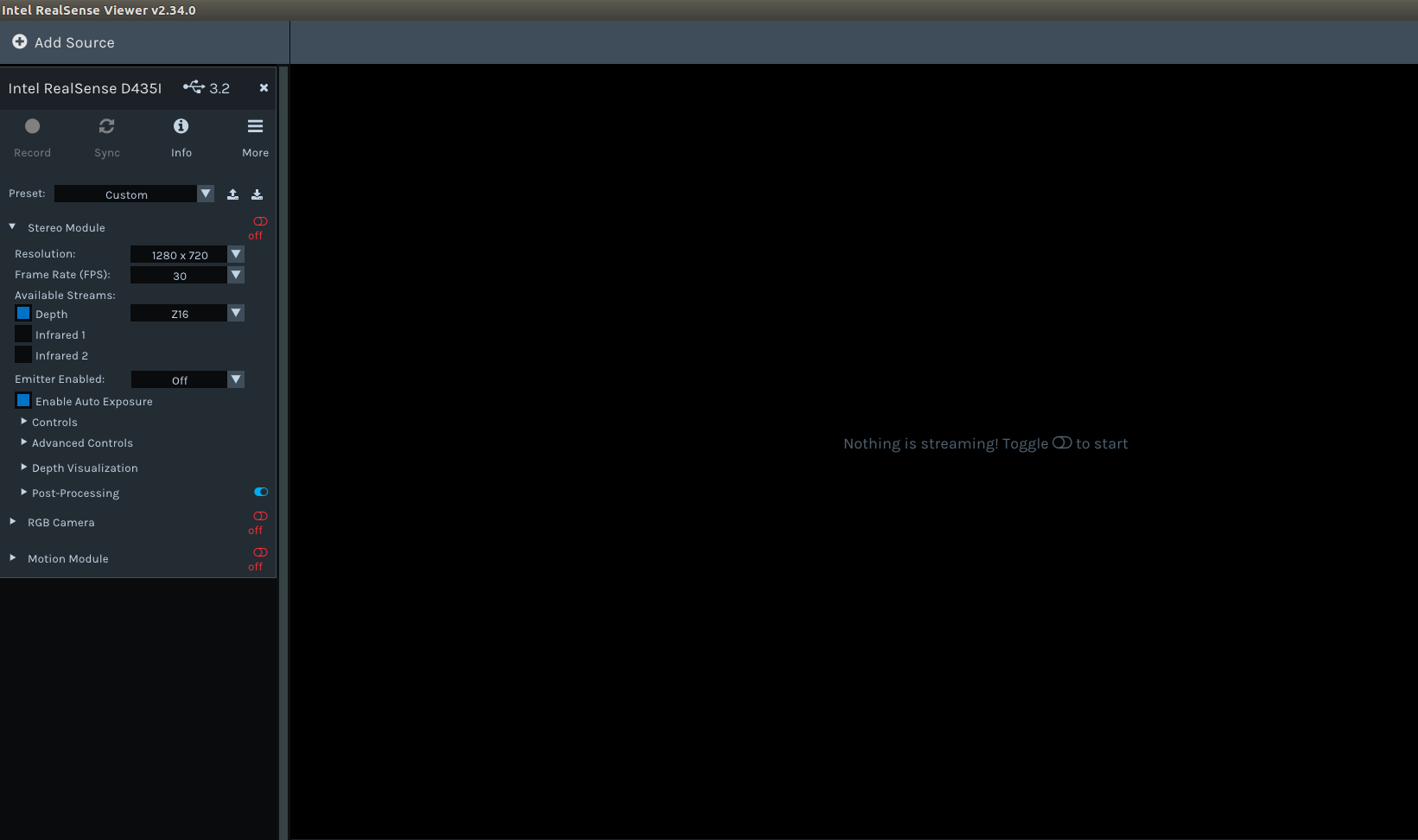
cd /usr/local/bin
./realsense-viewer
Realsense-ROS
git clone https://github.com/JetsonHacksNano/installRealSenseROS.git
./installRealSenseROS.sh <catkin_ws_name>
# Turns off the USB autosuspend setting on the Nano so that the camera is always available.
./setupNano.sh
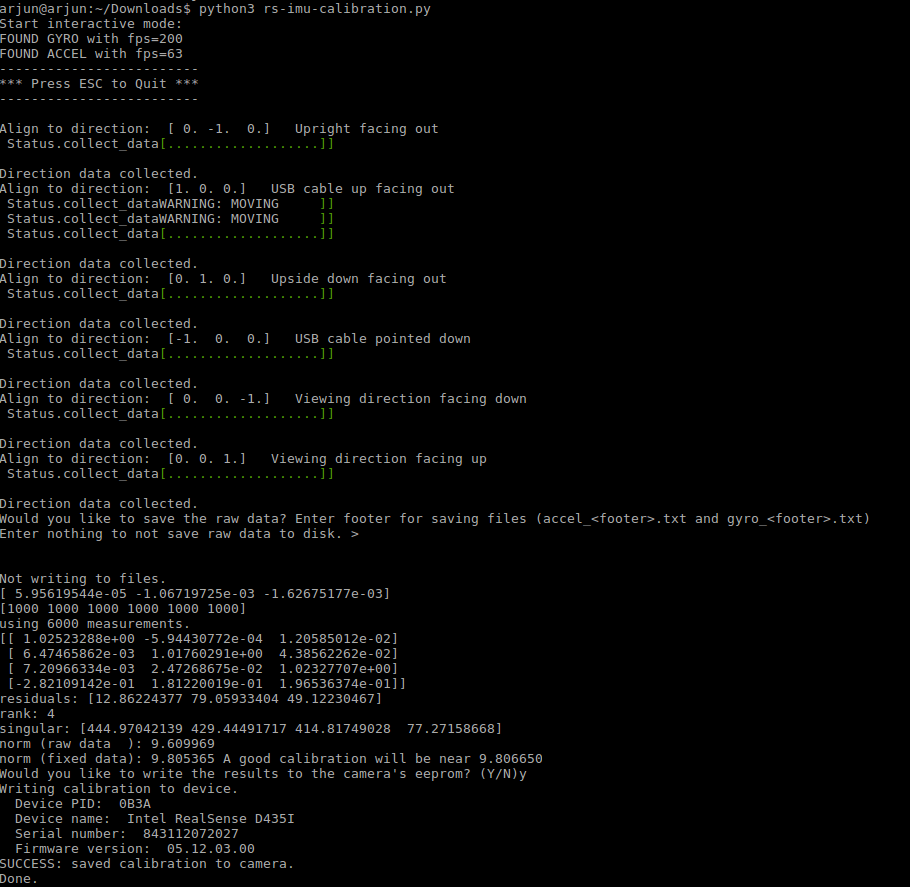
IMU calibration Steps
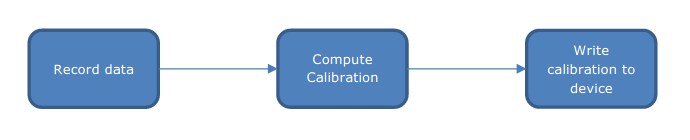
Calibration Process Overview
Refer this document for IMU calibration
cd vins-fusion-gpu-tx2
sudo pip3 install pyrealsense2
python3 rs-imu-calibration.py
Camera-IMU calibration
cd catkin_ws/src/
sudo apt-get install libv4l-dev
git clone https://github.com/ethz-asl/kalibr
cd .. && catkin_make